[ad_1]
Alors que l’industrie de l’Internet des objets (IoT) continue de prospérer, de nombreuses entreprises ont commencé à se développer Systèmes de localisation en temps réel (RTLS) pour les cas d’utilisation commerciale. Il existe plusieurs protocoles qui peuvent être utilisés dans RTLS pour déterminer l’emplacement d’un actif étiqueté. Certaines technologies plus récentes utilisées sont la plage de phase et l’angle d’arrivée (AoA). Dans cet article, nous explorerons les deux technologies, ainsi que les avantages et les inconvénients de chacune, dans le cadre d’un RTLS.
Qu’est-ce que la technologie de télémétrie de phase ?
Plage de phase détermine l’emplacement d’une étiquette d’actif en mesurant le déphasage aller-retour des signaux envoyés de l’étiquette à la balise, à plusieurs fréquences différentes. Cette information de phase est ensuite utilisée pour déduire la distance aller-retour. Étant donné que les radios BLE à faible puissance peuvent mesurer la phase avec une grande précision, cette technique permet une technologie de télémétrie à un coût bien inférieur à celui des systèmes basés sur le temps (tels que l’UWB).
Une fois que la balise a mesuré des portées jusqu’à au moins quatre balises (idéalement > 6), elle peut trilatérer son emplacement. Tout cela se passe en quelques centaines de millisecondes.
Qu’est-ce que la technologie d’angle d’arrivée (AoA) ?
De la même manière que Phase Ranging, AoA utilise des mesures de phase pour la localisation, mais c’est là que s’arrêtent les similitudes. Plutôt que de mesurer une plage allant d’une balise à une balise, AoA estime une ligne de relèvement d’une balise à un localisateur (un dispositif qui reçoit des signaux de balise). Le localisateur le fait en utilisant un réseau d’antennes et en commutant entre les éléments pendant la réception du signal. En comparant les déphasages entre ces éléments, l’angle du signal entrant peut être calculé. Lorsque le signal d’une étiquette est reçu par plusieurs localisateurs, l’emplacement de l’étiquette peut être déduit en estimant où les « rayons » de chaque localisateur se croisent.
Explorer les différences
Maintenant que vous avez une compréhension générale de Phase Ranging et AoA, explorons les fonctionnalités clés, les avantages et les inconvénients de ces Protocoles de communication RTLS.
-
Résolution
Dans un système AoA, la résolution dépend de la distance par rapport au localisateur. Cela peut être visualisé sous forme de rayons sur une roue ; plus vous vous éloignez du hub, plus la distance entre les rayons est grande. De même, plus une étiquette AoA est éloignée du localisateur, plus la résolution de localisation devient grossière. Cela impose des contraintes sur le placement des localisateurs, par exemple ils ne peuvent pas être montés sur des plafonds trop hauts. En revanche, la résolution du système de télémétrie de phase est purement fonction de la bande passante du signal et est indépendante de la portée, les balises doivent donc simplement être placées pour obtenir une couverture adéquate et fournir une bonne géométrie de télémétrie pour les balises.
-
Frais
Pour mesurer les angles, le localisateur AoA nécessite un réseau d’antennes multi-éléments relativement grand et personnalisé. En raison de cette complexité matérielle, l’AoA a tendance à être plus cher que les systèmes de télémétrie de phase. Les balises de télémétrie de phase peuvent utiliser des antennes omni de base (puce ou intégrées). La simplicité relative des composants Phase Ranging réduit les frais généraux pour l’utilisateur.
-
Installation
L’algorithme couramment utilisé pour calculer l’AoA est appelé MUSIQUE (Classification multi-signaux). Sur le plan informatique, il s’agit d’une procédure intensive – il n’est pas possible d’implémenter MUSIC sur l’étiquette d’actif ou le localisateur. Cela nécessite que chaque localisateur transporte les échantillons pour traitement vers un « processeur de périphérie » ou le cloud. Compte tenu de la quantité de données, la meilleure façon de procéder consiste à utiliser des connexions Ethernet câblées, ce qui augmente à la fois le coût du localisateur et la complexité de l’installation. Les balises Phase Ranging, quant à elles, calculent leur propre emplacement. Ils n’ont pas besoin d’une infrastructure de backhaul étendue. Grâce à l’utilisation d’un lien LPWAN (Low Power Wide Area Network) pour le backhaul, aucun câble n’est requis.
-
Chemins multiples
Quiconque s’occupe du suivi des actifs en intérieur sait que les objets métalliques peuvent refléter des signaux. Une grande partie du travail effectué par Link Labs avec les systèmes de télémétrie de phase a consisté à minimiser l’impact de la réflexion. Dans ce cas, AoA n’est pas vraiment comparable. Puisque la télémétrie mesure le temps d’arrivée du signal, elle discrimine naturellement les trajets multiples. Dans un système basé sur l’angle, les trajets multiples sont plus difficiles à identifier. Bien que l’algorithme MUSIC puisse aider à discriminer les trajets multiples, il présente une faiblesse importante : l’algorithme suppose que tous les signaux reçus ne sont pas corrélés (en d’autres termes, le signal ne provient pas de la même source). Cependant, les réflexions par trajets multiples sont fortement corrélées car il s’agit de versions retardées du même signal. Cela nécessite l’utilisation d’informations supplémentaires, telles que la force du signal, pour calculer une distance approximative jusqu’à l’étiquette, mais les mesures de portée basées sur la force du signal sont notoirement inexactes, en particulier à des distances plus éloignées du localisateur.
-
Précision
Précision est sans doute la métrique la plus importante d’un RTLS, mais aussi la plus nuancée. À titre d’exemple, voici une fonction de distribution cumulative (CDF) de la précision de la localisation à partir d’un entrepôt utilisant le système OnSite XLE Phase Ranging de Link Lab.
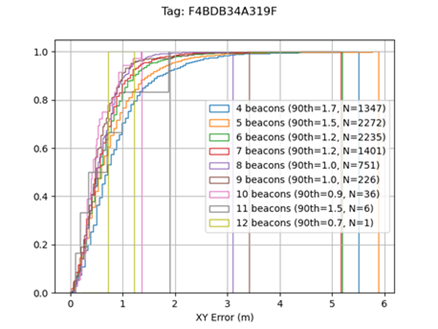
L’axe Y représente les centiles – par exemple 0,5 = 50 % – et l’axe X représente un paramètre – dans ce cas, la précision du système en mètres
Pour fournir des attentes réalistes, nous spécifions la précision au 90e centile (c’est-à-dire la précision qui a été atteinte 90 % du temps ; ce sont les statistiques spécifiées dans la légende du tracé ainsi que le nombre de balises utilisées dans le correctif) – dans cet exemple, c’est environ 1,2 mètre. Cependant, si nous utilisions plutôt le 50e centile comme spécification, nous pourrions dire qu’il a une précision de 40 cm. Lors de la comparaison des spécifications de précision du système, il est crucial que la méthodologie sous-jacente soit la même, sinon ce n’est pas une comparaison équitable. Après tout, en regardant le graphique ci-dessus, remarquez qu’un certain pourcentage du temps millimètre la précision a été atteinte. Les fournisseurs de systèmes moins scrupuleux peuvent choisir d’utiliser des nombres de centiles inférieurs pour que leur système semble plus précis qu’il ne l’est.
Plage de phases via AirFinder OnSite XLE
Comprendre les différences entre Phase Ranging et AoA est essentiel lors de la prise de décision sur la solution de suivi des actifs à mettre en œuvre. Cela dit, Phase Ranging est généralement considéré comme la meilleure technologie globale. Chez Link Labs, notre AirFinder Onsite Xtreme Low Energy (XLE) utilise la technologie Phase Ranging pour fournir aux utilisateurs une précision sans compromettre la durée de vie et le coût de la batterie de l’étiquette. Pour plus d’informations sur XLE, réserver une démo aujourd’hui.